Modelado de sistemas
Sistemas lineales
Para encontrar el modelo matemático de un sistema, se necesitan encontrar lo siguiente:
- Ecuación de movimiento de Euler-Lagrange.
- Ecuación de movimiento usando variables de estado.
- Función de transferencia $Y(s)/U(s)$.
Ecuación de movimiento de Euler-Lagrange
\[\newcommand{\dpartial}[2]{\dfrac{\partial#1}{\partial#2}} \newcommand{\derivate}[2]{\dfrac{d#1}{d#2}} \dpartial{}{}\left(\dpartial{L}{\dot{q}}\right) -\dpartial{L}{q}+\dpartial{D}{\dot{q}}=Q\]Donde:
\[\begin{aligned} L&=T-V\\ D&=\dfrac{1}{2}b\dot{x}\quad\leftarrow\text{para amortiguadores} \end{aligned}\]$T$ es la energía cinética.
$U$ es la energía potencial.
$D$ es la función de disipación de Rayleigh.
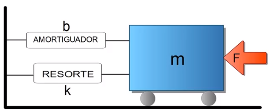
Supongamos un sistema resorte amortiguador, después de aplicar E-L, se obtiene la siguiente expresión:
Ecuación de movimiento de variables de estado
Para eso los pasos a seguir son los siguientes:
- Asignación de variables de estado.
- Asignación de las entradas y salidas
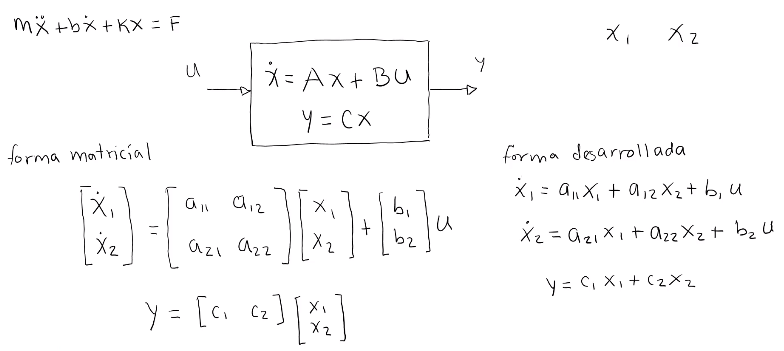
- Forma matricial
De la forma general:
\[m\dot{x_2}+bx_2+kx_1=u\]Se obtienen las ecuaciones:
\[\begin{aligned} \dot{x_1}&=\dot{x}=x_2\\ \dot{x_2}&=-\dfrac{k}{m}x_1-\dfrac{b}{m}x_2+\dfrac{1}{m}u\\ y&=x_1 \end{aligned}\]Ahora se pasa a forma matricial:
\[\newcommand{\matrix}[4]{\begin{bmatrix} #1 & #2 \\ #3 & #4 \end{bmatrix}} \newcommand{\vector}[2]{\left[\begin{array}{c} #1 \\ #2 \end{array}\right]} \begin{aligned} \vector{\dot{x_1}}{\dot{x_2}}&=\matrix{1}{0}{-\frac{k}{m}}{-\frac{b}{m}}\vector{x_1}{x_2}+\vector{0}{\frac{1}{m}}u\\ y&=\left[1\quad0\right]\vector{x_1}{x_2} \end{aligned}\]Función de transferencia
Se puede obtener a partir de la fomra de Euler-Lagrange, Variables de estado o forma Matricial.
Se aplica la transformada de Laplace y se lleva a la forma $\dfrac{Y(s)}{U(s)}$.
Por Euler-Lagrange
\[m\ddot{x}+b\dot{x}+kx=F\]Se aplican las transformadas de Laplace:
\[ms^2X(s)+bsX(s)+kX(s)=\mathcal{F(s)}\]Se lleva a la forma:
\[\dfrac{X(s)}{\mathcal{F}(s)}=\dfrac{1}{ms^2+bs+k}\]Por variables de estado
\[\begin{aligned} \dot{x_1}&=\dot{x}=x_2\\ \dot{x_2}&=-\dfrac{k}{m}x_1-\dfrac{b}{m}x_2+\dfrac{1}{m}u\\ y&=x_1 \end{aligned}\]Se aplica la transformada de Laplace:
\[\begin{aligned} sX_1(s)&=X_2(s)\\ sX_2(s)(s)&=-\dfrac{k}{m}X_1(s)-\dfrac{b}{m}X_2(s)+\dfrac{1}{u}\\ Y(s)&=X_1(s) \end{aligned}\]Desarrollando se llega al mismo resultado.
Por la forma matricial
Existe una fórmula general para obtener la función de transferencia aplicando las operaciones matriciales correspondientes a partir de la siguiente forma:
\[\begin{aligned} \dot{x}&=Ax+Bu\\ y&=Cx \end{aligned}\]Se aplica la siguiente fórmula:
\[\dfrac{Y(s)}{U(s)}=C(sI-A)^{-1}B\]Sistemas no lineales
Para algunos sistemas, sus ecuaciones resultan ser no lineales y por lo tanto se requiere un paso extra para modelar el sistema:
- Ecuación de movimiento de Euler-Lagrange.
- Ecuación de movimiento usando variables de estado no lineal.
- Linealizar
- Determinar los puntos de equilibrio
- Linealizar alrededor de los puntos de equilibrio encontrados.
- Función de transferencia Y(s)/U(s).
Ecuación de movimiento de Euler-Lagrange
Tomando en cuenta el caso de un pendulo simple con friccón:
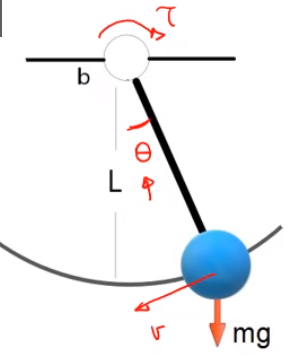
Se obtiene la ecuación:
Se aprecia que es un sistema no lineal debido a la expresión $\sin{\theta}$.
Ecuaciones de movimiento en variables de estado.
- Asignación de variables de estado.
- Asignación de las entradas y salidas
- Forma matricial
De la forma general:
\[mL^2\dot{x_2}+mgL\sin{x_1}+bx_2=u\]Se obtienen las ecuaciones:
\[\begin{aligned} \dot{x_1}&=\dot{\theta}=x_2\\ \dot{x_2}&=-\dfrac{g}{L}\sin{x_1}-\dfrac{b}{mL^2}x_2+\dfrac{1}{mL^2}u\\ y&=x_1 \end{aligned}\]Linealización
Se busca representar un sistema de ecuaciones de forma linealizada.
\[\begin{aligned} \dot{x}&=f(x)+g(x)u\\ y&=h(x) \end{aligned}\quad\Rightarrow\quad \begin{aligned} \Delta\dot{x}&=\Delta A(x)+Bu\\ y&=C\Delta x \end{aligned}\]Donde:
\[\newcommand{\dpartial}[2]{\dfrac{\partial#1}{\partial#2}} A=\begin{bmatrix} \dpartial{f_1}{x_1}&\dpartial{f_1}{x_2}&\ldots\\ \\ \dpartial{f_1}{x_1}&\dpartial{f_2}{x_2}&\ldots\\ \vdots&\vdots \end{bmatrix}_{\large{x_0}}\] \[B=\left.g(x)\right|_{x_0}\] \[\newcommand{\dpartial}[2]{\dfrac{\partial#1}{\partial#2}} C=\begin{bmatrix} \dpartial{h}{x_1}&\dpartial{h}{x_2}&\ldots \end{bmatrix}_{\large{x_0}}\]Esto se hace primeramente mediante un cambio de variable:
\[\Delta x=x-x_0\]Donde:
$\Delta x$= La nueva variable linealizada.
$x$= La nueva variable anterior.
$x_0$= El punto de equilibrio.
Puntos de equilibrio
Se hace la entrada y velocidades del sistema sean igual a cero.
\[\begin{aligned} u&=0\\ \dot{x}&=0 \end{aligned}\]Por lo tanto:
\[\begin{aligned} 0&=f(x)+g(x)0\\ f(x)&=0\quad\rightarrow\quad x_1,\ x_2,\ \text{etc}. \end{aligned}\]Los puntos críticos son los estados del sistema que cumplen con la condición anterior.
Ejemplo
Puntos de equilibrio
\[\begin{aligned} f_1(x)=\dot{x_1}&=\dot{\theta}=x_2\\ f_2(x)=\dot{x_2}&=-\dfrac{g}{L}\sin{x_1}-\dfrac{b}{mL^2}x_2+\dfrac{1}{mL^2}u\\ y&=x_1 \end{aligned}\]Siguiendo con el ejemplo del péndulo simple, primero se encuentran los puntod de equilibrio.
\[\begin{aligned} 0&=x_2\\ 0&=-\dfrac{g}{L}\sin{x_1} \end{aligned}\]Por lo tanto, los puntos de equilibrio serán:
\[\begin{aligned} x_1&=n\pi;\quad n=0,1,2,\ldots\\ x_2&=0 \end{aligned}\]Analizando el sistema, los puntos de equilibrio son:
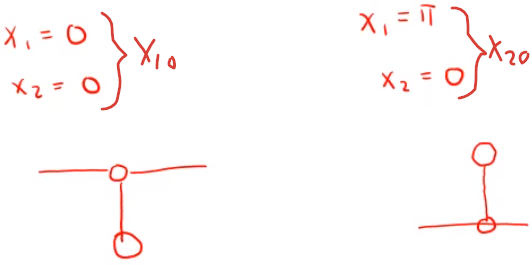
En realidad físicamente, sólo hay 2 puntos de equilibrio.
Linealización
Primero se realizan los cambios de variable.
\[\Delta x_1=x_1-x_{10}\\ \Delta x_2=x_2-x_{20}\]Ahora se obtienen las derivadas parciales de la matriz $A$.
\[\newcommand{\dpartial}[2]{\dfrac{\partial#1}{\partial#2}} \begin{alignedat}{2} \dpartial{f_1}{x_1}&=0&\quad\dpartial{f_1}{x_2}&=1\\ \\ \dpartial{f_2}{x_1}&=-\dfrac{g}{L}\cos{x_1}&\quad\dpartial{f_2}{x_2}&=-\dfrac{b}{mL^2} \end{alignedat}\]Se obtienen las componentes $B$ y $C$.
\[\newcommand{\dpartial}[2]{\dfrac{\partial#1}{\partial#2}} B=\begin{bmatrix}0\\\\\frac{1}{mL^2}\end{bmatrix}\quad C=\begin{bmatrix}\dpartial{h}{x_1}=1&&\dpartial{h}{x_1}=0\end{bmatrix}\]Se escriben las ecuaciones matricialmente.
\[\newcommand{\matrix}[4]{\begin{bmatrix} #1 & #2 \\ #3 & #4 \end{bmatrix}} \newcommand{\vector}[2]{\left[\begin{array}{c} #1 \\ #2 \end{array}\right]} \begin{aligned} \vector{\Delta\dot{x_1}}{\Delta\dot{x_2}}&=\matrix{0}{1}{-\frac{g}{L}\cos{x_1}}{-\frac{b}{mL^2}}\vector{\Delta x_1}{\Delta x_2}+\vector{0}{\frac{1}{mL^2}}u\\ y&=\left[1\quad0\right]\vector{\Delta x_1}{\Delta x_2} \end{aligned}\]Evaluando ahora en el punto de equilibrio inferior:
\[x_1=0;\quad x_2=0\\\] \[\newcommand{\matrix}[4]{\begin{bmatrix} #1 & #2 \\ #3 & #4 \end{bmatrix}} \newcommand{\vector}[2]{\left[\begin{array}{c} #1 \\ #2 \end{array}\right]} \begin{aligned} \vector{\Delta\dot{x_1}}{\Delta\dot{x_2}}&=\matrix{0}{1}{-\frac{g}{L}}{-\frac{b}{mL^2}}\vector{\Delta x_1}{\Delta x_2}+\vector{0}{\frac{1}{mL^2}}u\\ y&=\left[1\quad0\right]\vector{\Delta x_1}{\Delta x_2} \end{aligned}\]Evaluando ahora en el punto de equilibrio superior:
\[x_1=\pi;\quad x_2=0\\\] \[\newcommand{\matrix}[4]{\begin{bmatrix} #1 & #2 \\ #3 & #4 \end{bmatrix}} \newcommand{\vector}[2]{\left[\begin{array}{c} #1 \\ #2 \end{array}\right]} \begin{aligned} \vector{\Delta\dot{x_1}}{\Delta\dot{x_2}}&=\matrix{0}{1}{\frac{g}{L}}{-\frac{b}{mL^2}}\vector{\Delta x_1}{\Delta x_2}+\vector{0}{\frac{1}{mL^2}}u\\ y&=\left[1\quad0\right]\vector{\Delta x_1}{\Delta x_2} \end{aligned}\]Función de transferencia
Se obtiene la función de transferencia para ambos puntos críticos:
\[\begin{aligned} sX_1(s)&=X_2(s)\\ sX_2(s)&=\mp\dfrac{g}{L}X_1(s)-\dfrac{b}{mL^2}X_2(s)+\dfrac{1}{mL^2}U(s)\\ Y(s)&=X_1(s)\\ \end{aligned}\\\]Sustituyendo:
\[s^2Y(s)=\mp\dfrac{g}{L}Y(s)-\dfrac{b}{mL^2}sY(s)+\dfrac{1}{mL^2}U(s)\\\]Despejando se obtiene:
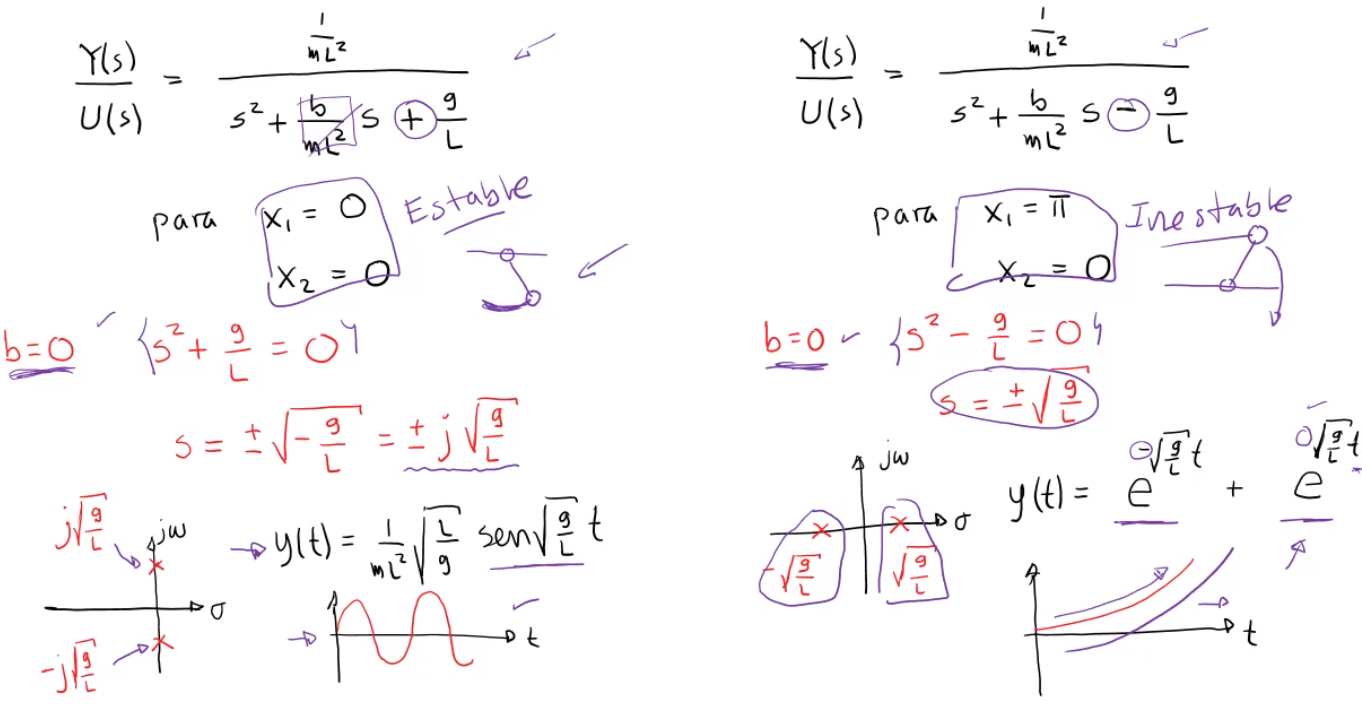
\[\begin{aligned} &\dfrac{Y(s)}{U(s)}=\dfrac{\dfrac{1}{mL^2}}{s^2+\dfrac{b}{mL^2}s+\dfrac{g}{L}}\quad &\dfrac{Y(s)}{U(s)}=\dfrac{\dfrac{1}{mL^2}}{s^2+\dfrac{b}{mL^2}s-\dfrac{g}{L}}\\\\ &\text{para}\quad x_1=0,\quad x_2=0;&\text{para}\quad x_1=\pi,\quad x_2=0; \end{aligned}\]Información obtenida de los polos y la linealización