Introducción a los sistemas en tiempo discreto
De manera general, un sistema en tiempo discreto se define en función del periodo de muestreo $T$ y el instante de muestreo $k$
Un sistema en tiempo discreto se representa como,
\[\boxed{x((k+1)T) = f(x(kT),u(kT))}\]con $T = 1$
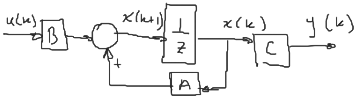
\[x((k+1)) = f(x(k),u(k))\]Para un sistema lineal:
\[(a)\quad\begin{cases} x(k+1) = Ax(k) + Bu(k)\\ y(k) = Cx(k) \end{cases}\]Su diagrama de bloques es el siguiente:
Ejemplos
-
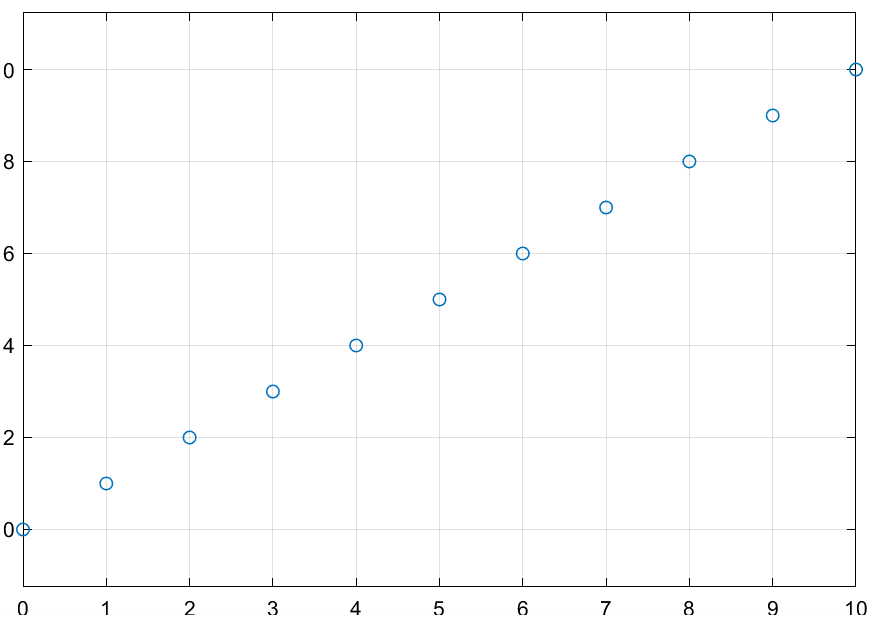
Simular el siguiente sistema en timpo discreto
\[\begin{cases} x(k+1) = x(k) + 1\\ x(0) = 0 \end{cases}\]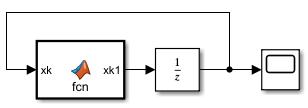
function xk1 = fcn(xk) xk1 = xk + 1;Se configura el solver para tener paso fijo de 1.
##### Resultado
-
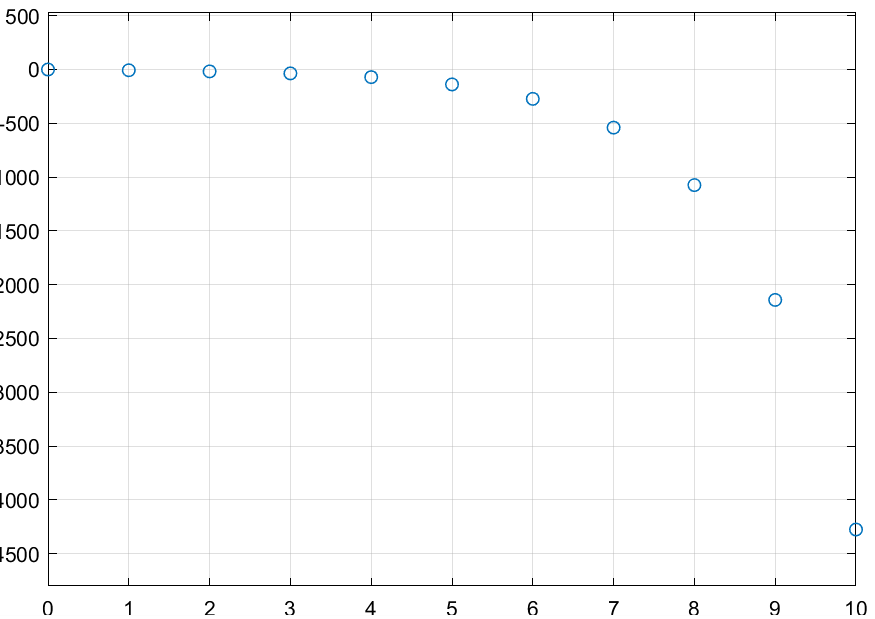
Simular el siguiente sistema en timpo discreto
\[\begin{cases} x_1(k+1) = 2 x_1(k) + 0.5 x_2(k) - 5\\ x_2(k+1) = 0.8 x_2(k) + 2\\ y(k) = x_1(k) - x_2(k)\\ \end{cases}\quad\begin{aligned} x_1(0) &= 2\\ x_2(0) &= -1\\ \end{aligned}\] \[\begin{cases} x(k+1) = \begin{bmatrix} 2 & 0.5\\ 0 & 0.8 \end{bmatrix}x(k) + \begin{bmatrix} -5\\2 \end{bmatrix}u(k)\\ y(k) = \begin{bmatrix} 1 & -1 \end{bmatrix}x(k) \end{cases}\quad,\quad u(k) = 1\]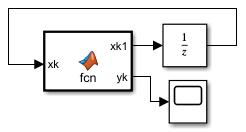
function [xk1,yk] = fcn(xk) A = [2 0.5 0 0.8]; B = [-5 2]'; C = [1 -1]; u = 1; xk1 = A*xk + B*u; yk = C*xk;Se configura el solver para tener paso fijo de 1.
##### Resultado