Control de velocidad en lazo abierto para un motor de CD
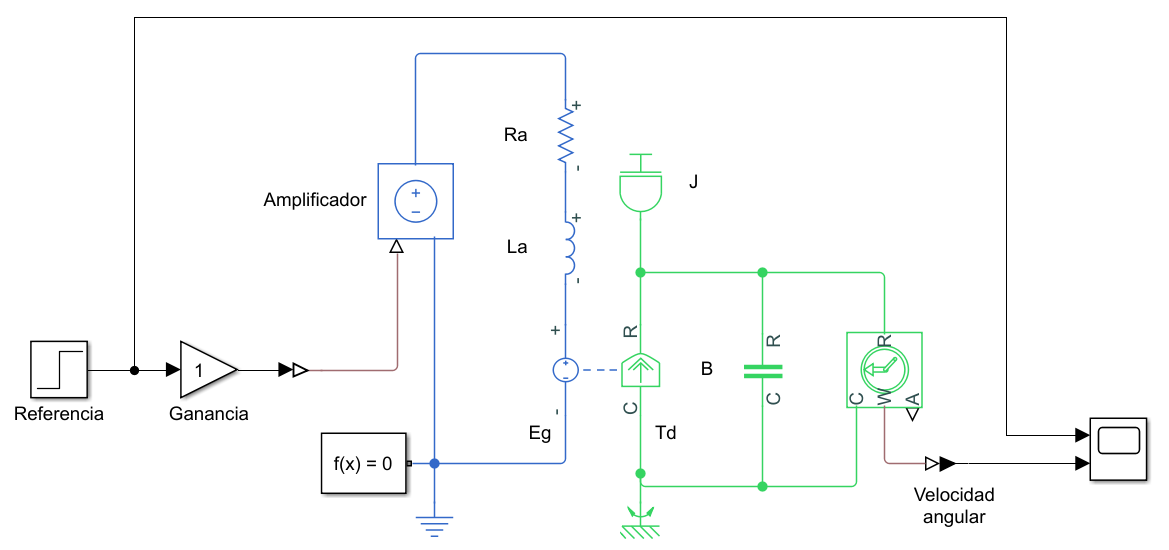
El modelo de Simulink, representa un motor de CD en lazo abierto. Los valores del modelo son los siguientes:
Al simular su respuesta al impulso unitario, se obtiene el siguiente resultado:
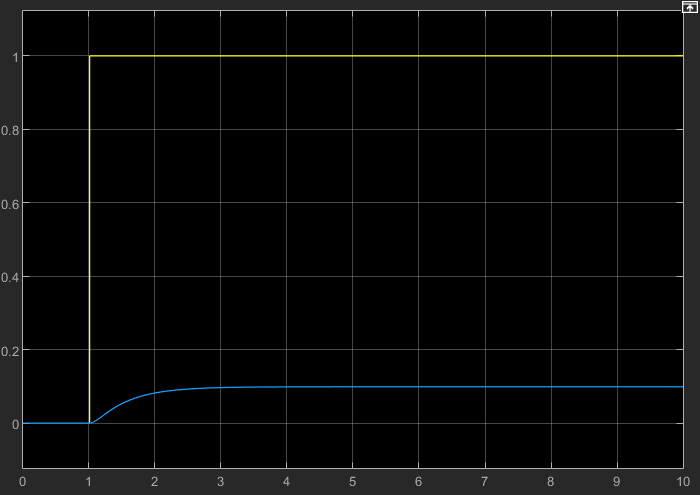
Como se puede apreciar, no se llega a l valor requerido. Para ello, es necesario implementar una ganancia que que compense el sistema para que pueda llegar al valor deseado.
Ganancia de un sistema LTI en estado estacionario
La ganancia de un sistema en tiempo continuo se puede calcular a partir de su modelo en variables de estado como:
\[K_s = D - C(I-A)^{-1}B\]Procedimiento
- Obtener el modelo del sistema en variables de estado.
- Obtener la ganancia del sistema en estado estacionario.
- Calcular la inversa de la ganancia del sistema e implementarla en la ganancia del controlador.
Para esto se utiliza el siguiente script en MATLAB:
J = 0.01;
B = 0.1;
K = 0.01;
Ra = 1;
La = 0.5;
s = tf('s');
H = K/((s*J + B)*(Ra + s*La) + K^2);
C = 1/dcgain(H)
El comando dcgain obtiene la ganancia de un sistema LTI en el estado estacionario.
Así, para el ejemplo, la ganancia que se debe aplicar en el controlador es de $C = 10.01$
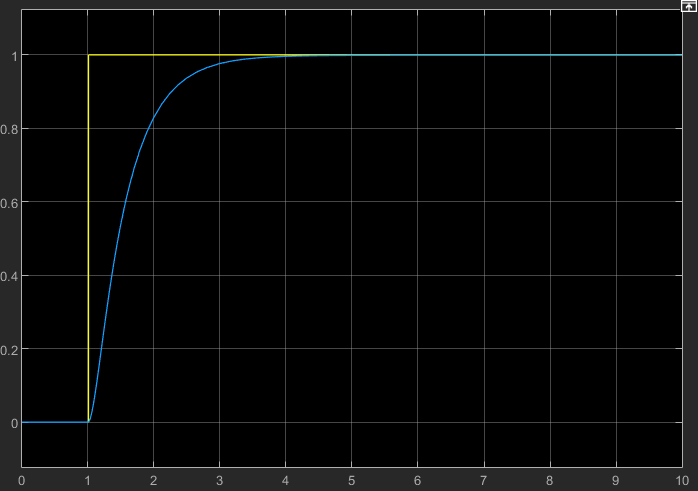
Cambiando la ganancia y volviendo a simular, se obtiene el siguiente resultado: