Microacelerómetro
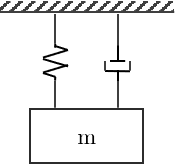
Tomando en cuenta el sistema mása resorte amortiguador:
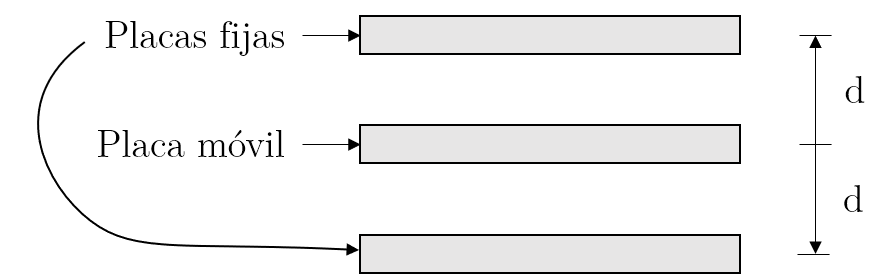
Para medir el desplazamiento de $m$ se utiliza un circuito de capacitores diferenciales
Su circuito equivalente es el siguiente:
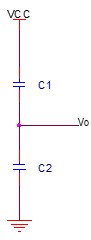
Como
\[C_1 = \frac{1}{G_1}\qquad C_2 = \frac{1}{G_2}\]Entonces
\[\boxed{V_o = \frac{G_2 - G_1}{C_1 + C_2} V_s}\]Funcionamiento general
- La aceleración produce un desplazamiento en el sensor.
- El desplazamiento genera un cambio en los valores de las capacitancias.
- El cambio en las capacitancias produce una tensión de salida.
Modelo matemático
Aplicando la transformada de Laplace en $(1)$ con $c.i. = 0$.
\[\tag{2} \begin{aligned} \frac{X(s)}{\large a(s)} &= \frac{m}{m s^2 + bs + k}\\ &= \frac{1}{s^2 + \frac{b}{m}s + \frac{k}{m}}\\ \end{aligned}\]Comparando el sistema con la función de transferencia general para sistemas de segundo orden:
\[\dfrac{C(s)}{R(s)}=\dfrac{\omega_n^2}{s^2+2\xi\omega_n s +\omega_n^2}\]Podremos estimar cual es la frecuencia natural del sistema y su factor de amortiguamiento.
\[\omega_0 = \sqrt{\frac{k}{m}}\] \[\xi = \frac{b}{2\sqrt{km}}\]Siendo $a$ constante en $(2)$, se puede determinar el valor de $x$ en estado estacionario.
\[\boxed{x = \frac{ma}{k}}\]Método del trapecio
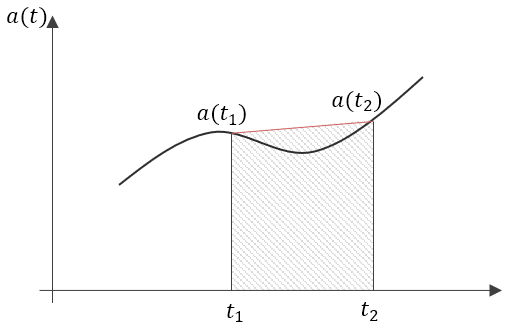
Por lo tanto
\[\boxed{v(t) = (t_2 - t_1)\frac{a(t_1) + a(t_2)}{2}}\]