Cinemática directa
Matrices de rotación
Son matrices que describen una operación de rotación:
\[p^{0} = R^{0}_1 p^{1}\]Donde:
$p^0$ es el punto en el marco $0$.
$R^0_1$ es la matriz de rotación que vincula el marco $1$ hacia el marco $0$.
$p^0$ es el punto en el marco $1$.
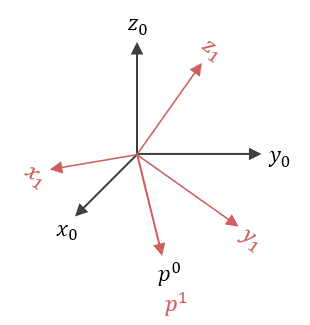
Los puntos son físicamente el mismo, pero sus descripciones cambian dependiendo del marco. Las matrices de rotación sirven como traductoras entre marcos coordenados.
Construcción de una matriz de rotación
La construcción de una matriz de rotación, se puede hacer mediante la técnica de proyección:
\[R^0_1 = \begin{bmatrix} x_1 \cdot x_0 & y_1 \cdot x_0 & z_1 \cdot x_0\\ x_1 \cdot y_0 & y_1 \cdot y_0 & z_1 \cdot y_0\\ x_1 \cdot z_0 & y_1 \cdot z_0 & z_1 \cdot z_0\\ \end{bmatrix}\]